
谈谈不足转向 之 为什么要弱不足转向

上一篇文章中我们谈到了民用车基本都是 “不足转向”的,操控风格的不同主要是基于不同的不足转向程度。通常来说攻城狮在开发时都定义车辆需要有适当的弱不足转向特性。那么为什么要不足转向而且要弱不足转向呢?
一辆车是一个复杂的系统,但无论是多么复杂的系统,都有其自身的一些固有属性。其中稳定性是重要的一个属性。
稳定性又包含两个方面,一方面是指车辆本身在接受驾驶者输入之后表现出来的瞬态的和稳态的特性,称之为响应特性;另外一方面就是车辆抵抗外界干扰的能力,称之为抗干扰特性。
不足转向是瞬态响应特性的要求
通常习惯于使用转向角阶跃试验来考察汽车的响应特性。这里先通俗介绍一下几个概念。
转向角阶跃试验:对匀速直线行驶的车辆突然施加一个固定的方向盘转角并保持,然后观察车辆瞬态和稳态的表现。
横摆角速度:指车辆绕垂直的轴线旋转的速度。
横摆角速度增益:指横摆角速度和前轮转角之比,也称为转向灵敏度。
对于具有不足转向或中性转向的车辆,施加转角以后,车辆出现横摆震荡并且能够收敛后稳定下来,收敛的速度取决于阻尼等参数。
对于过度转向的车辆,转向时的车速超过某一值后,车辆的横摆震荡不能收敛。对于驾驶者来说,意味着施加转角后车辆一直处于来回摆动的震荡状态,显然是不能接受的。
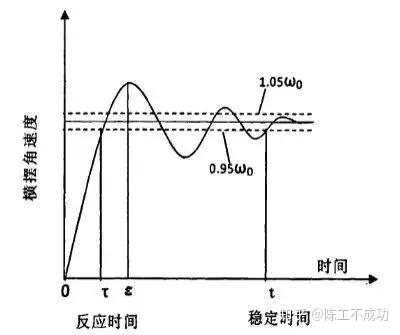
图1 方向盘角阶跃输入下汽车的瞬态响应
不足转向是稳态响应特性的要求
对于中性转向的车辆,横摆角速度增益是跟车速成正比的。车速越快,转向越灵敏。对于普通驾驶者来说,可能速度提高到某个程度之后,转向的灵敏度已经快到“无法控制”。
对于不足转向的车辆,横摆角速度增益随着车速的增加先缓慢增大后缓慢减小。
对于过度转向的车辆,横摆角速度增益随着车速的增加而呈几何级数快速增加,到某一车速时达到无穷大,即车辆极其灵敏,稍稍转动方向盘,车辆就表现出极快的“旋转”。显然此时比中性转向的情况更恶劣,车辆呈现出极其难以控制的不稳定状态。
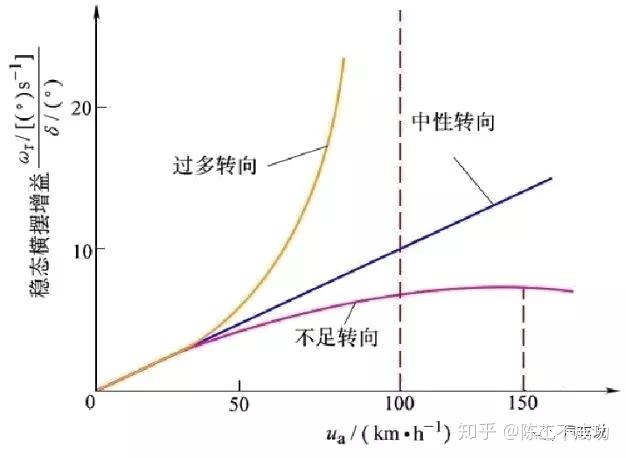
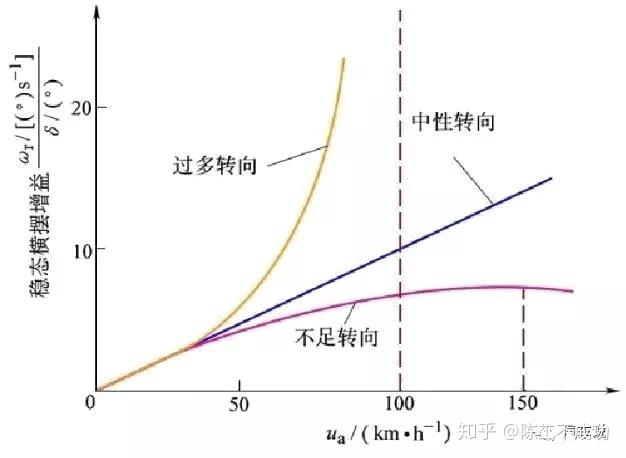
图2 横摆角速度随车速的变化
不足转向是抗干扰特性的要求
再来看看遇到干扰时车辆的稳定性表现。车辆行驶时候的干扰包括侧向风、路面不平等等。这里以常见的侧向风为例说明。
直行的车辆受到到侧向风带来干扰力矩作用时,瞬间发生偏转,偏离原来的行驶方向,前后轮上均产生侧向力。
对于中性转向的车辆,前后轮上产生的侧向力基本相等,如果没有人为干预,不能改变车辆的偏转趋势,车辆将继续偏转。
对于不足转向的车辆,后轮上产生的侧向力比前轮的大,形成与干扰力矩方向相反的力矩,所以即使没有人为干预,车辆也能恢复到原来的形式方向。
对于过度转向的车辆,前轮上产生的侧向力比后轮的大,形成与干扰力矩方向相同的力矩,迅速加剧车辆的偏转,使之进入极不稳定的状态。
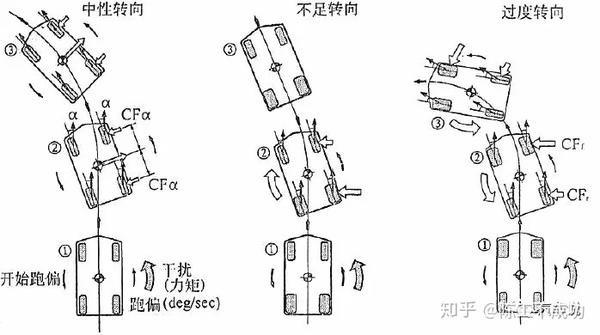

图3 不同车辆的抗干扰特性
不足转向是符合驾驶者本能反应的要求
从人的本能反应来说,稳定的转弯行驶情况下,车辆“缓慢地”(这个慢是相对于过度转向时车辆的偏离速度来说的)稍稍偏离原有车道向外“走”,那么只要及时修正方向即可。只要修正量大小适中,能够让驾驶者从容面对而不会“措手不及”,都是可以接受的。反过来,如果车辆往弯道内侧偏离,而且是 “加速”(这个加速不是指车速,是指偏离的速度)偏离,那么势必会让驾驶者产生“措手不及”的恐慌状态。
不足转向是转向响应灵敏度的要求
前面介绍了横摆角速度增益代表的就是转向灵敏度。转向灵敏度需要控制在一定范围内,太大或者太小都不好。
过度转向车的转向灵敏度急剧上升且无上限,只要车是过度转向特性的,灵敏度就可能会大到失控的状态。
中性转向车的转向灵敏度虽然没有过度转向车上升的那么快,但也是无上限的,所以也不可取
不足转向车的灵敏度上升最慢且有峰值,只要对不足转向的程度加以控制即采用弱的不足转向,就能将转向灵敏度控制在合理的区间内。
不足转向是各种工况下适应性的要求
以上讨论的都是理想的状态。实际使用中,对于一辆车来说,不足转向程度在不同的工况下会发生变化。如果一辆车的不足转向程度极小,甚至是中性转向的,那么在某些工况下,比如弯道中突然制动,由于载荷由后轴向前轴转移,将有极大可能使车辆变为具有过度转向的特性,导致车辆非常不稳定,易于发生交通事故。因此定义不足转向特性时不易将其设计得过于“弱”,应有一定的适应性,以满足不同工况下的要求,使车辆始终呈现趋于稳定的状态。
满足驾驶者的驾驶需求是车辆性能的内在驱动。对于普通驾驶者,首先要保证的就是车辆的行驶稳定性和安全性,因此需要具备弱不足转向特性。至于个别跑车或赛事中的赛车,因为是以竞速为目的,而且车手具备普通消费者所不具备的、高超的驾驶技巧和经验,因此设计和调校的更偏向中性转向。